cutting robot
delta robot detecting and cutting eggplant stems.
this is a project i built to automate cutting eggplant stems on a moving conveyor. it combines industrial hardware with custom software to cut the stems of eggplants despite their organic diversity. it cuts over 30 tons of eggplants at full speed in a day with 99% accuracy.
overview
the robot is a delta robot and a trio motion controller. it is driven by four servos: three for the delta arms and one for the blade rotation.
also instead of just moving to a point, the arm synchronizes with the conveyor speed, allowing the blade to slice through moving targets with millimeter accuracy without ever stopping the line.
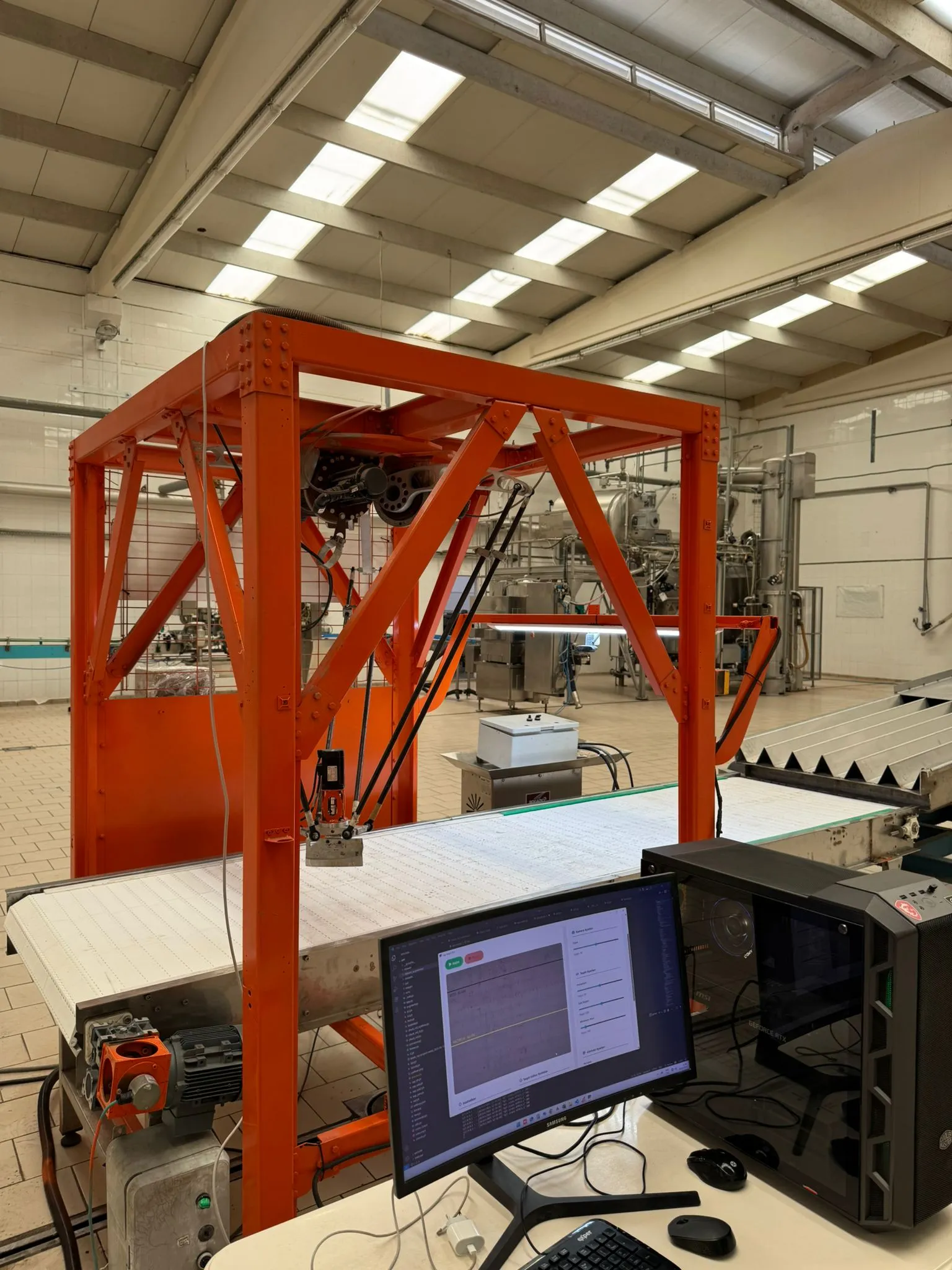

i wrote the motion logic in triobasic and used ethercat for low-latency realtime communication. detections are made using python and opencv using a custom yolo model i trained.
well, this was my first time working with industrial robots and it was a great experience to test motion control and real-time systems on a large scale.
computer vision & control
teaching a robot to “see” isn’t easy. i started by recording over an hour of video of eggplants moving on a conveyor, then spent hours manually annotating thousands of frames to create a custom dataset. this data was used to train a yolo model that can detect the eggplant’s body and stem. i successfully trained a model and used it for realtime object detection. but detection alone wasn’t enough for a production line.
i built a custom tracker (like deepsort) that assigns a unique id to each eggplant. this prevents detecting the same eggplant multiple times.
after detection, a geometric algorithm calculates the position and angle needed for the cut. the result of the algorithm is smoothed out by calculating the average of the same eggplant’s previous results.
all the results sent to the robot via ethercat. the software i wrote using triobasic running on the robot puts the results in a queue and executes them in order.
i also made a ui for the operators. they can change camera settings, adjust many parameters like confidence threshold (basically telling the robot how sure it needs to be before cutting), and monitor performance in realtime.
viral reach
the funniest part? i was not planning to share this because it was a private industrial project. someone else filmed the robot in action and posted it, and suddenly it was everywhere. it hit the top of r/oddlysatisfying on reddit with 6k+ upvotes and racked up over 1.5 million views across different platforms.